
Şekil 1 Quadcopter SimMechanics blok diyagramı
Motor çıkışından alın Revolet ile pervanin dönmesi sağlanmaktadır. Revolute bağlı olan Joint actuator yani tor olarak isimlendirilen bloktan O.5 Nm’lik bir tork ile pernanenin dönmesini sağlayan değer atanır. Joint sensör ile ise çıkışı Tork olan yani Scope dan Tork grafiğini zamana göre elde edilir. Body sensör ile ise konumu çıkışını almak için scope bağlanır.Dairesel blok ile ise pervanenin dairesel olarak dönerken RPM yani hızını ölçmek için joint sensör ile beraber scope dan zaman göre grafiği elde edilir.
Enw olarak gösterilen blok ise yerçekimi değeri tanımlanır, Rootground ile ise yüzeye olan uzaklı tanımlanır. Weld bloğu durumlar arasındaki ilişkiyi sağlar. Body coordinate systems (CS) Sürücü tarafından seçilen vücut CS bağlı bir komşu organ ya da zemin üzerinde koordinat sistemi olarak tanımlanır.
Şekil 2 Quadcopter
SimMechanics motor ve pervane mekaniği-1

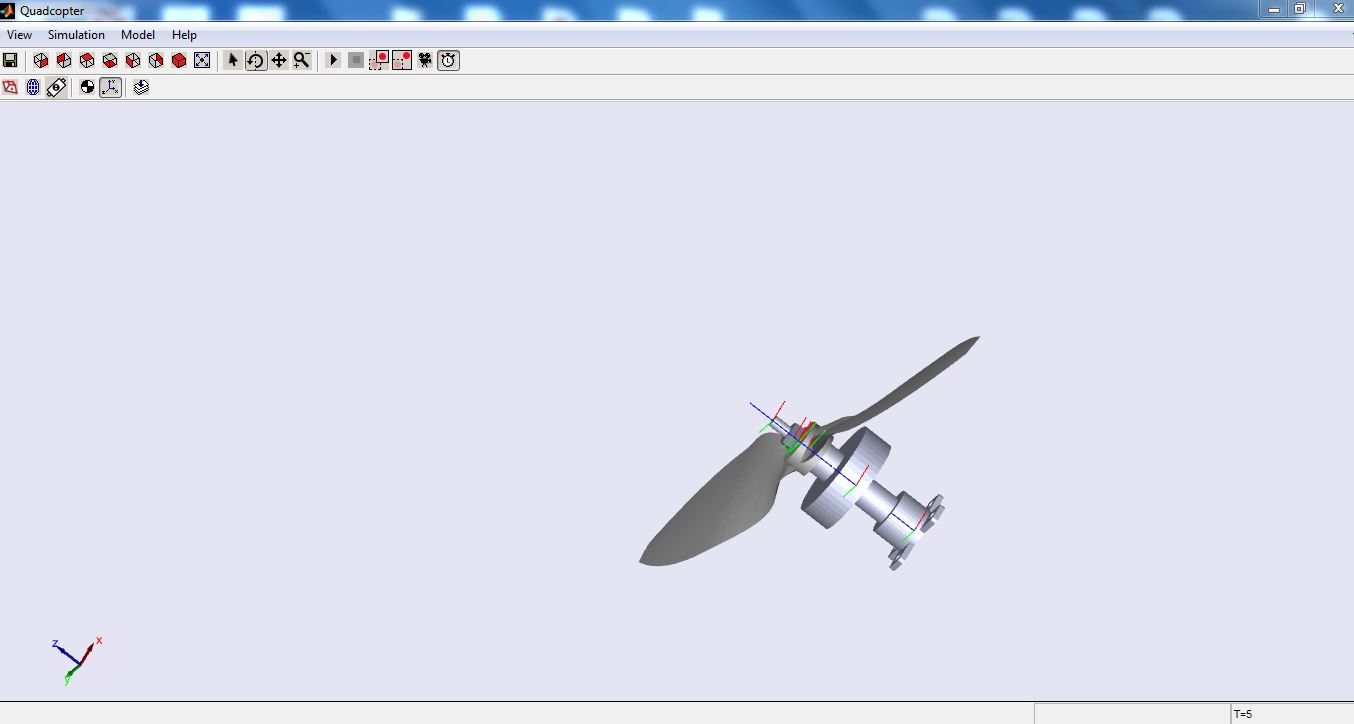
Şekil 3 Quadcopter
SimMechanics motor ve pervane mekaniği-2

Şekil 4 Quadcopter
SimMechanics 0.5 Nm ‘lik Tork Grafiği

Şekil 5 Quadcopter
SimMechanics 0.5 Nm Torktaki RPM Grafiği

Şekil 6 Quadcopter SimMechanics Konum Grafiği
Quadcopter pervanesi döndüğünde, konum sabit kalacaktır. Bundan dolayı
konum grafiğinde görüldüğü gibi sadece konum da değişiklik olmayacaktır.
Hiç yorum yok:
Yorum Gönder